Non possiamo con la rappresentazione matriciale presentata nell’articolo sulle Trasformazioni Nel Piano concatenare la rotazione e la scala con la traslazione. Questo perché in questo secondo caso abbiamo una somma matriciale e nei primi due abbiamo una moltiplicazione.
Possiamo però riscrivere le matrici nel cosiddetto “sistema di riferimento omogeneo”. Non starò qui a spiegare il concetto di sistema di riferimento omogeneo, dirò solo che un punto A la cui rappresentazione matriciale è 
Le rispettive matrici di trasformazione diventano:

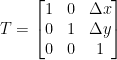
Traslazione:
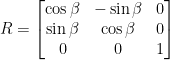
Rotazione:
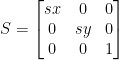
Scala:
Vediamo se i conti ci tornano 🙂
Questa volta possiamo utilizzare la moltiplicazione tra matrici anche per la Traslazione.
Traslazione

Che è esattamente il nostro punto traslato in coordinate omogenee.
Rotazione

Che è esattamente il nostro punto ruotato in coordinate omogenee.
Scala

Che è esattamente il nostro punto scalato in coordinate omogenee.
Regola di composizione
Quando si compongono 2 o più trasformazioni la precedente è sempre a destra della successiva. Ovvero se abbiamo 3 trasformazioni 


